LS'PROJECTS
- 2018 年“TI杯”全国大学生电子设计竞赛 成功参赛 2018.07
- 第七届重庆大学“树声前锋杯电工电子技能竞赛” 一等奖 2018.12
- 第十六届“挑战杯”重庆大学选拔赛 2019.05
- 第十届“大学生科研训练计划”(SRTP)项目 2019.06
- 第八届“国家级大学生创业训练”(国创)项目 2020.07
- 第八届“全国大学生光电设计大赛” 2020.08
- 重庆大学第五届“互联网+”大学生创新创业大赛 2019.08
- 2019年全国大学生电子设计竞赛“TI杯” 2019.10
这里记录的是我从本科开始的做的一些项目,感谢所有曾经一起做比赛、做项目的队友们,那些一起奋斗的时光带给了我成长、喜悦与友谊,同时那也是青春所在的地方!我是个不爱回忆过去的人,但整理项目时翻看过去的照片,感到了满满幸福感!
2018 年“TI杯”全国大学生电子设计竞赛 成功参赛 2018.07
大一时,我与队友们参加了2018 年“TI 杯”全国大学生电子设计竞赛,比赛的题目是 《D题:手势识别装置》 ,利用FDC2214 芯片采集手势信息,经过卡尔曼滤波器将四个通道的数据进行滤波处理,然后用算法程序实现“石头、剪刀、布”手势识别。
(比赛连熬几天大夜,测评前KTV一整晚,第二天早起参加测评的睁不开眼精神小伙!)
📌项目摘要
在计算机科学中,手势识别是通过数学算法来识别人类手势的一个议题。手势识别可以来自人的身体各部位的运动。用户可以使用简单的手势来控制或与设备交互,让计算机理解人类的行为。
本系统利用FDC2214采集手势信息,经过Kalman filtering将四个通道的数据进行滤波处理,处理掉可能干扰结果的数据,从而使采集到的手势信息更加精准,然后用算法程序进行手势判断。从而使系统具有良好的性能,能很好地实现手势的训练与判决。本系统通过大量的调试手势识别算法参数,最终可以实现猜拳、划拳的训练与判决等题目内容。
📌个人负责
我在团队中负责嵌入式开发,采用stm32 单片机与LCD 屏幕作为系统的控制、显示部分。
📌系统方案
手势识别装置由主控模块、检测模块、FDC2214电容传感器模块、按键模块、LCD显示模块、电源模块组成。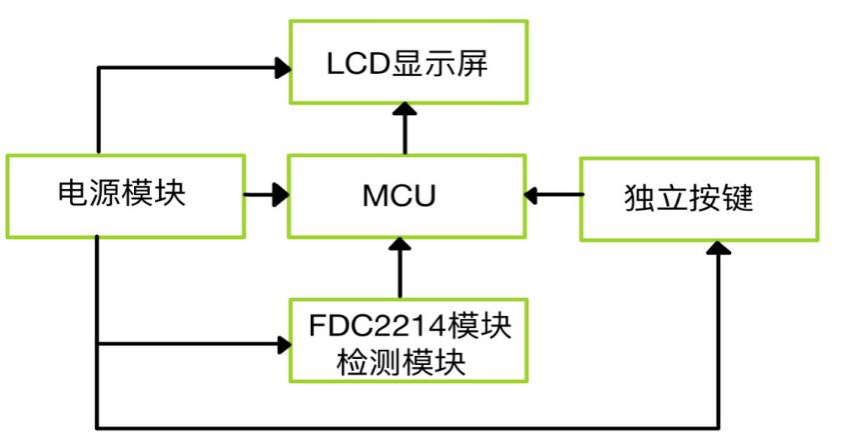
主控模块主要由单片机最小系统构成,对各个模块的工作进行协调。检测模块与FDC2214电容传感器模块主要是用于手势信号数据的采集并传输给单片机,使系统形成稳定,可靠的闭环系统。按键模块主要是使用按键输入指令选择系统需要执行的相关程序。LCD显示模块主要是用于显示判别的手势结果以及引导并提示用户进行手势信息的采集。电源模块主要是对供电电源进行变压、稳压、保证各个模块正常、稳定工作。
Kalman filtering 算法
卡尔曼滤波器发生作用的前提是各个手势所返回的电容值在其定义域内具有正态的高斯分布规律。每一个变量都具有一个平均值μ(这个值在变量的概率密度函数分布图的最中心位置,代表该数值是最可能发生的)和σ2(这个数值代表方差,表示变量的不确定性程度)。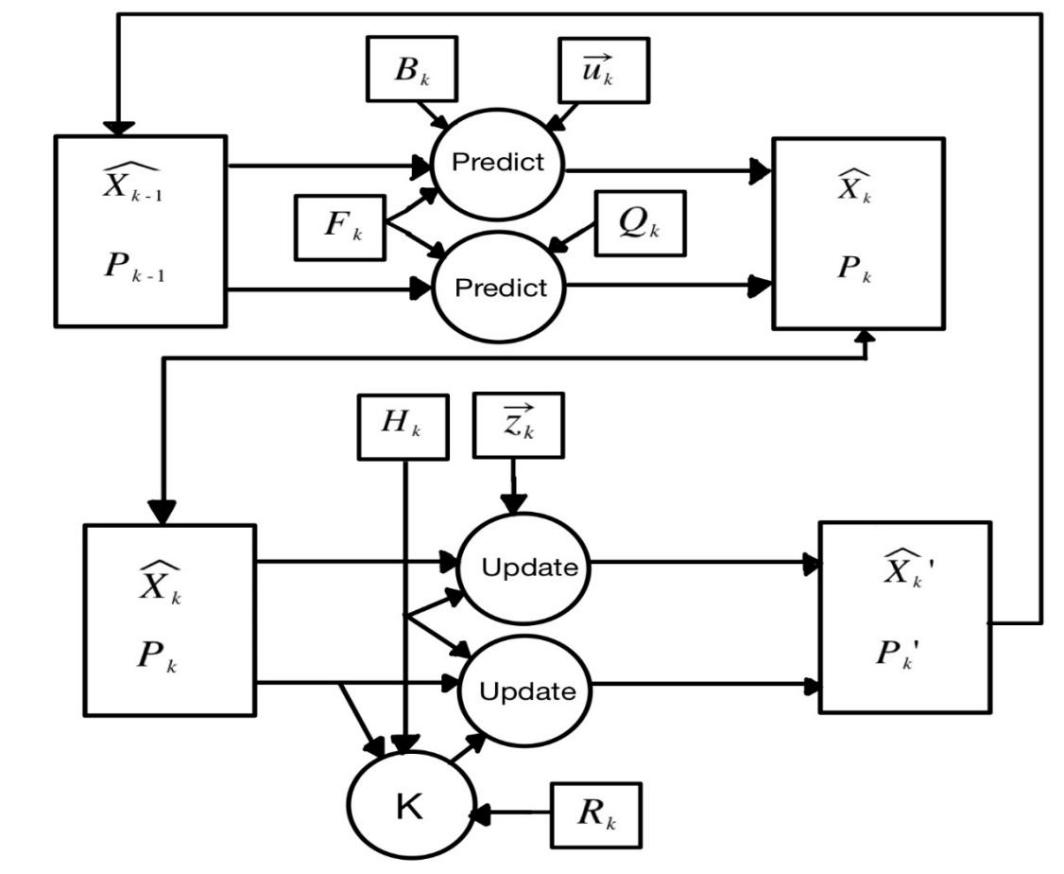
👩🏻🔧硬件
手势识别系统实物图如图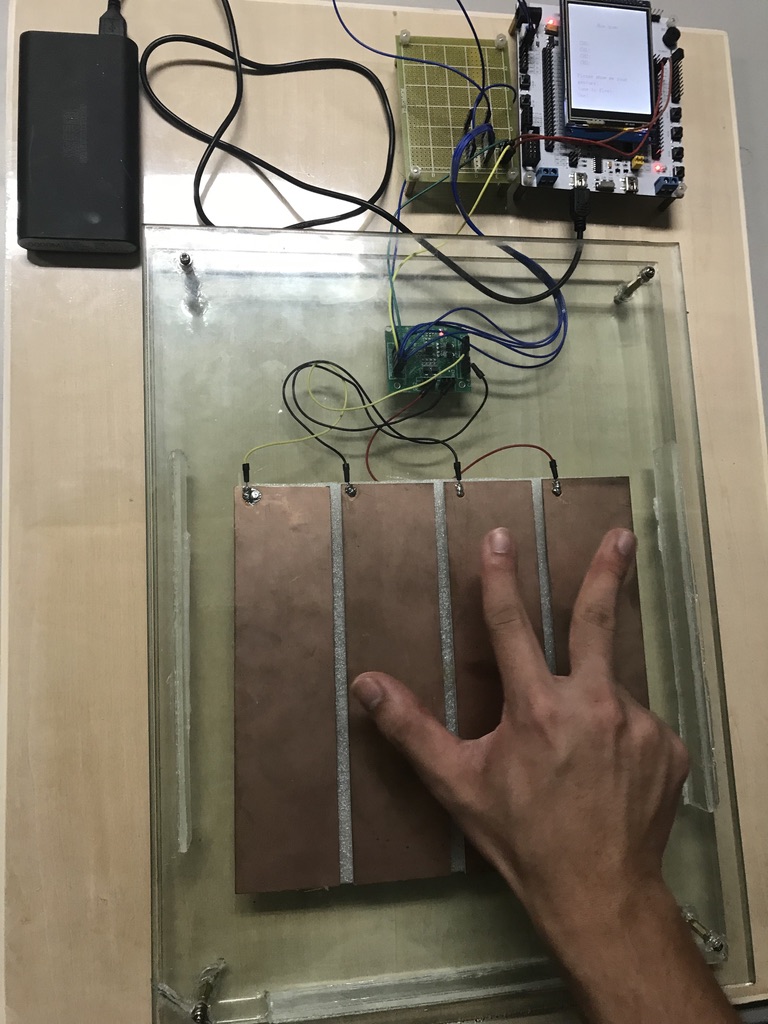
👩🏻💻软件
系统采用独立按键控制输入指令,按照每一题的要求设置相应的指令,Mode1 对应猜拳模式,Mode2对应划拳模式, Mode3猜拳训练模式, Mode4划拳训练模式,对于不同的模式系统会作出不同的反应,数据会反馈到与单片机相连的显示屏上。
1️⃣主程序流程图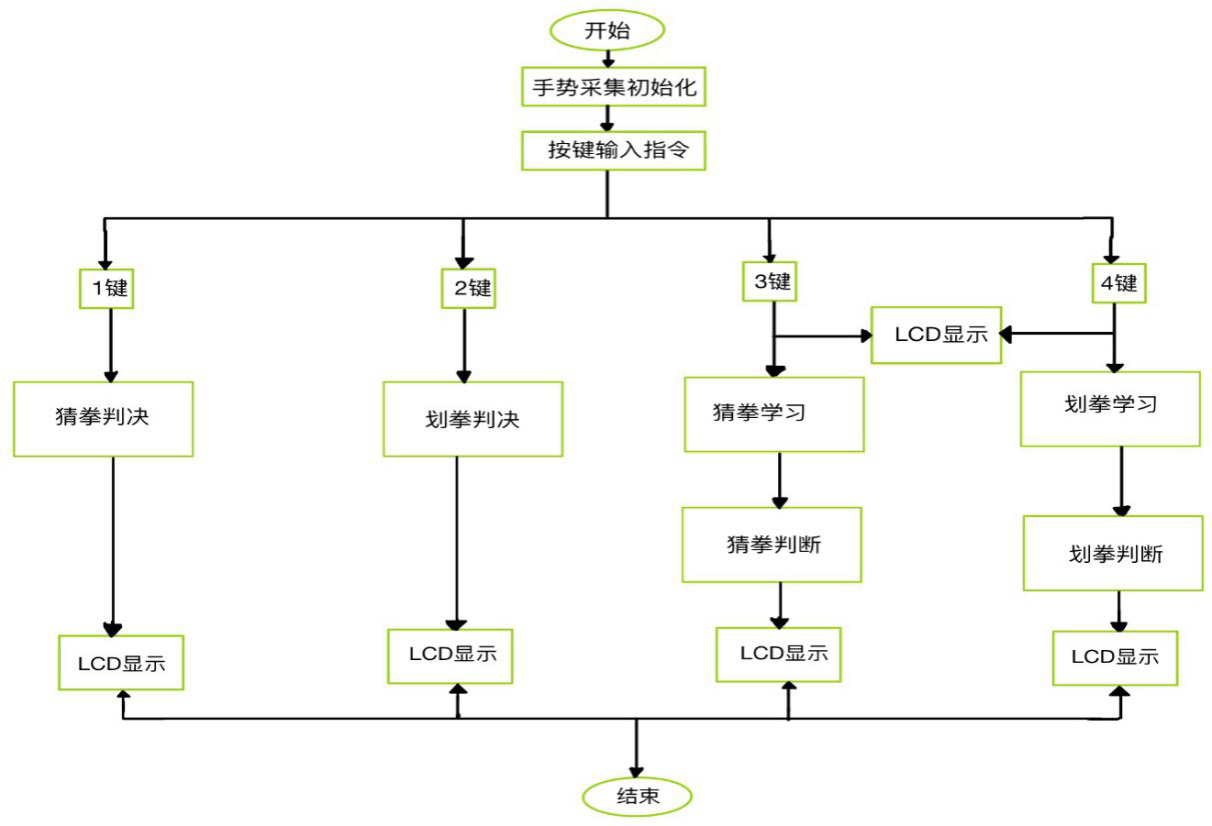
2️⃣判决程序流程图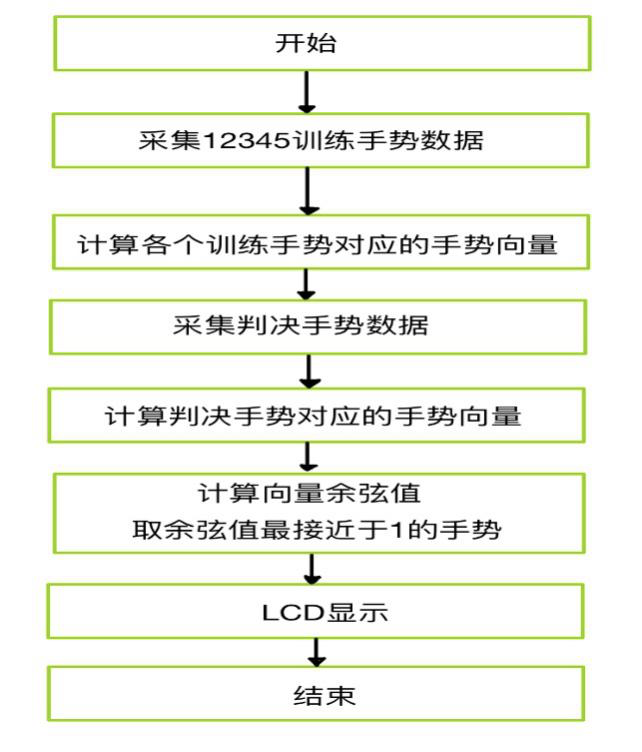
3️⃣测试
通过依次比划石头-剪刀-石头-剪刀收集四个通道收集到的数据进行matlab分析得到数据分布,从返回值达到0.012开始,收集采集到的130次数据值。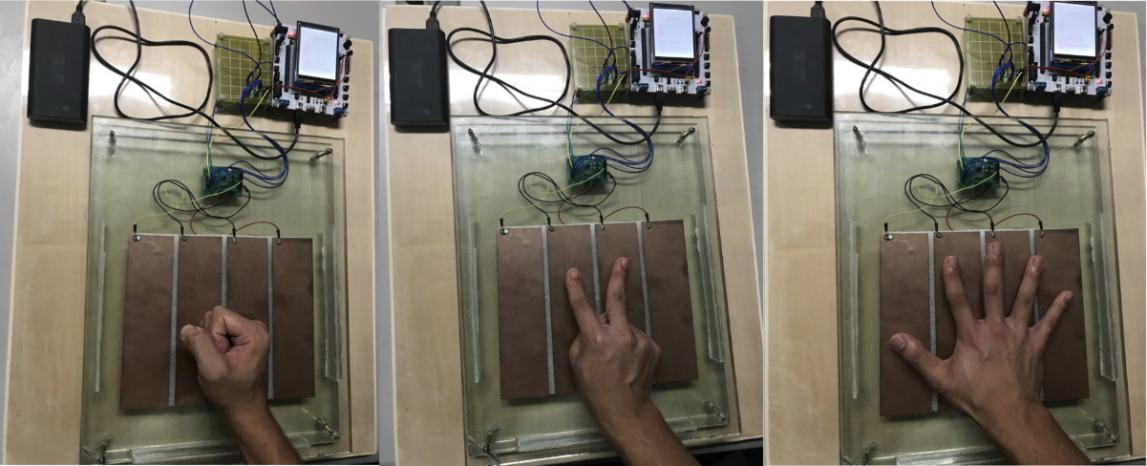
PAPER的ch1、ch2的平均值可以突破1,ch0、ch3的平均值可以突破0.2;
SCISSORS的ch1、ch2的平均值可以突破0.6;其余情况用来判断ROCK。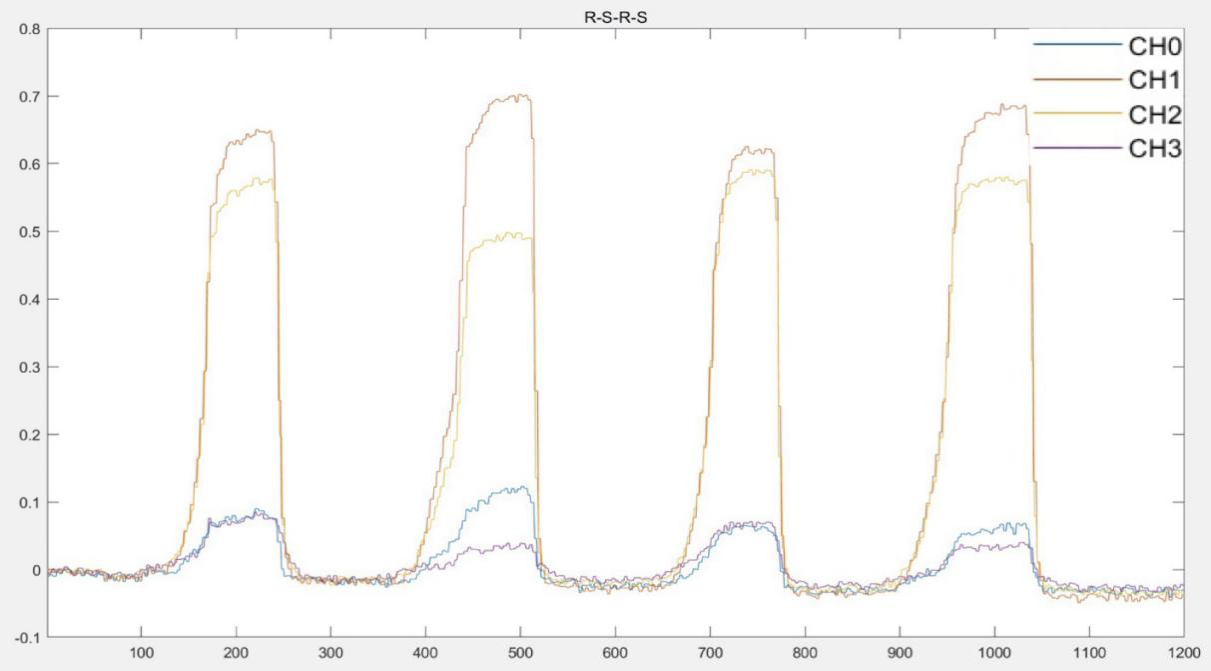
训练模式下,规定采样时分别出以手势石头、剪刀、布,通过对大量不同同学的手势采样。分析得到,手势布ch1、ch2的峰值最大;手势石头ch2峰值较大,手势剪刀ch2峰值较小。本程序采用采取到布的峰值最大值以及峰值最大值减去0.1作为手势布的判断阈值,当返回的数据在这个范围内时判断为布; 并且将石头与剪刀ch2最大值的平均值的0.12倍作为石头与剪刀的判断值,大于此值判断为剪刀,小于此值判断为石头。
四通道手势测试分析图如图所示。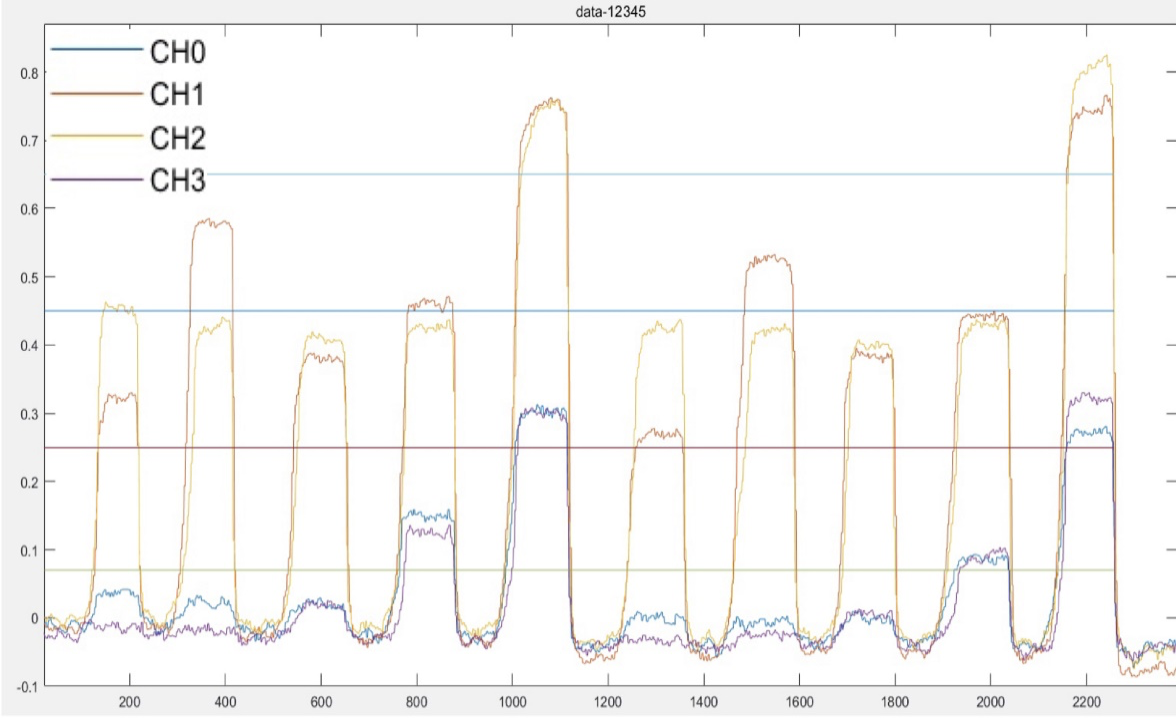
📌总结
菜鸟第一次参加比赛,项目粗糙但经历珍贵,友谊更加更加珍贵!我永远都不会忘记那一次KTV哒!!!
第七届重庆大学“树声前锋杯电工电子技能竞赛” 一等奖 2018.12
大二第一学期,我参加了重庆大学“树声前锋杯”电工电子技能竞赛并获得了一等奖,比赛的题目是 《单相正弦波逆变电源》 。
这次比赛是我第一次登上领奖台拿奖,对我来说有着非常重要的意义。我在单片机的学习、调试、实践过程中体会了程序这个“磨人的小妖精“的独特魅力。再次感谢举办方——重庆大学电气工程学院以及队友,颁奖报导。
📌项目摘要
竞赛题目是:《单相正弦波逆变电源》。需设计并制作输出正弦交流电压 Uo 有效值为 10V、额定输出电流 Io 有效值为 1A 的单相逆变电源,负载为阻性;输入直流电压 UI =15V。结构框图如图所示。
(1)UI=15V、Io=1A 条件下,输出电压 Uo=10±0.2V,频率 fo=50±0.5Hz,输出正弦波无明 显失真;
(2)UI=15V、Io=1A 条件下,尽量提高逆变电源效率在ŋ=(Uo·Io)/(Ui·Ii);
(3)UI=15V、Io在0.1-1A范围内变化,负载调整率 SI≤1%;
(4)输出频率可步进调整,步进值不大于 5Hz,频率调整范围不小于 20-100Hz;
(5)具有输出过流保护功能,Io≥1.5A 时动作;且故障排除后能够自动恢复。
📌个人负责
在项目中我负责系统嵌入式部分程序设计,采用“规则采样法”利用STM32单片机产生SPWM波形,输出频率可在20~100hz内步进调整。
📌系统方案
逆变器是把直流电能转变成定频定压或调频调压交流电(一般为220V,50Hz正弦波)的转换器。它由逆变桥、控制逻辑和滤波电路组成。
逆变器是一种DC to AC的变压器,它其实与转化器是一种电压逆变的过程。转换器是将电网的交流电压转变为稳定的直流输出,而逆变器是将Adapter输出的直流电压转变为高频的高压交流电;两个部分同样都采用了用得比较多的脉宽调制(PWM)技术。
其核心部分都是一个PWM集成控制器,逆变器内部设一个误差放大器,一个调节器、振荡器、有死区控制的PWM发生器、低压保护回路及短路保护回路等。
👩🏻🔧硬件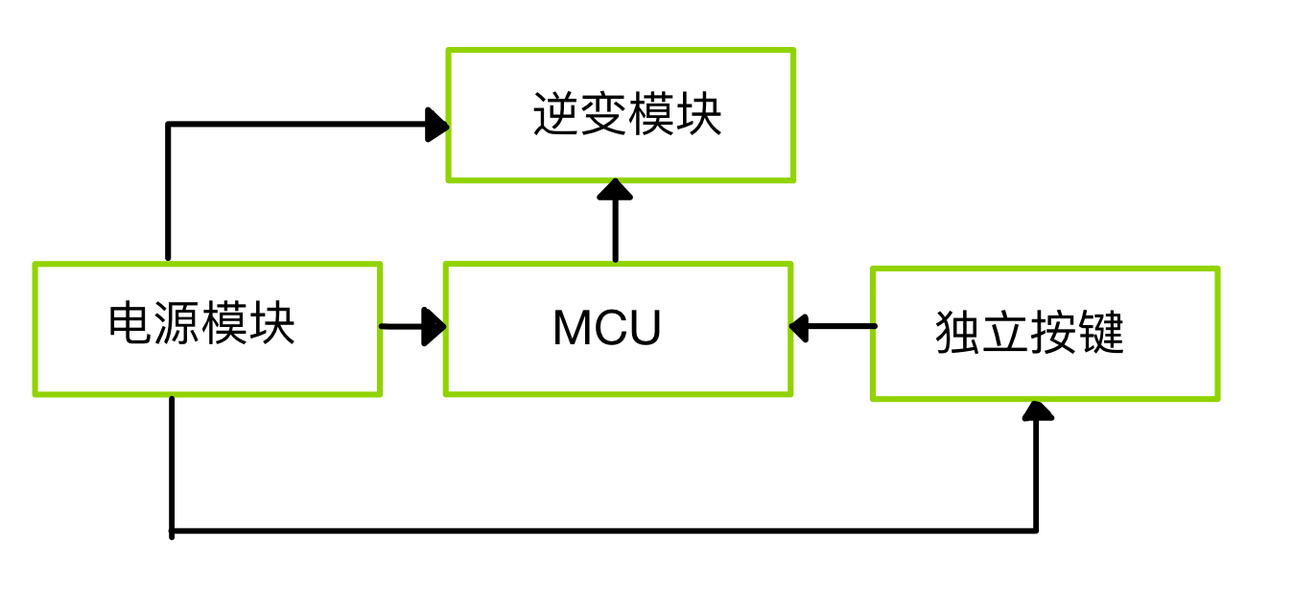
👩🏻💻软件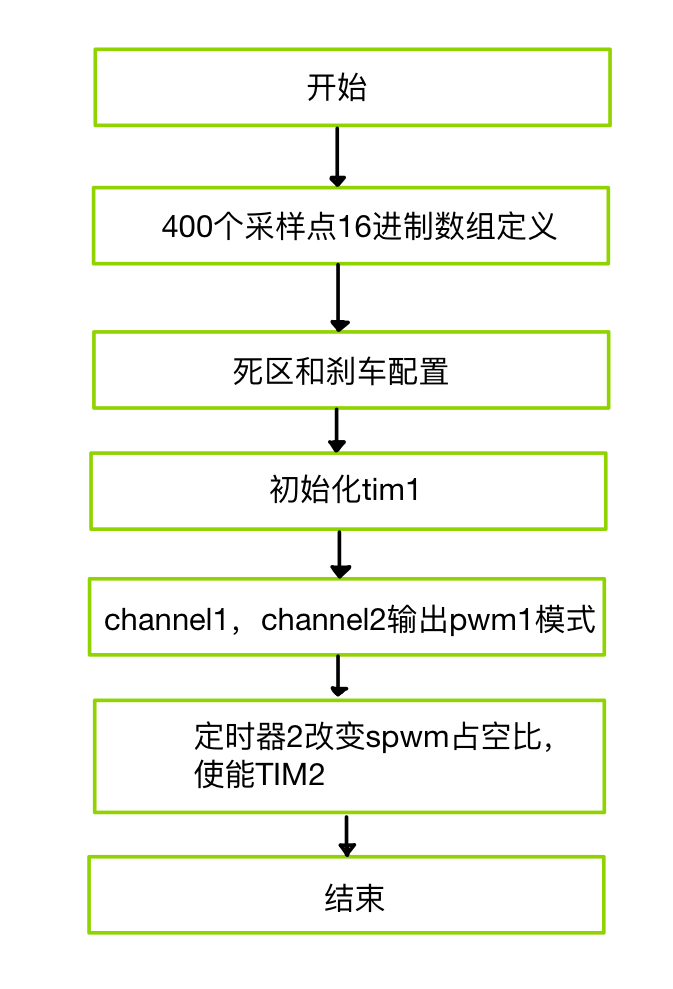
🎁实物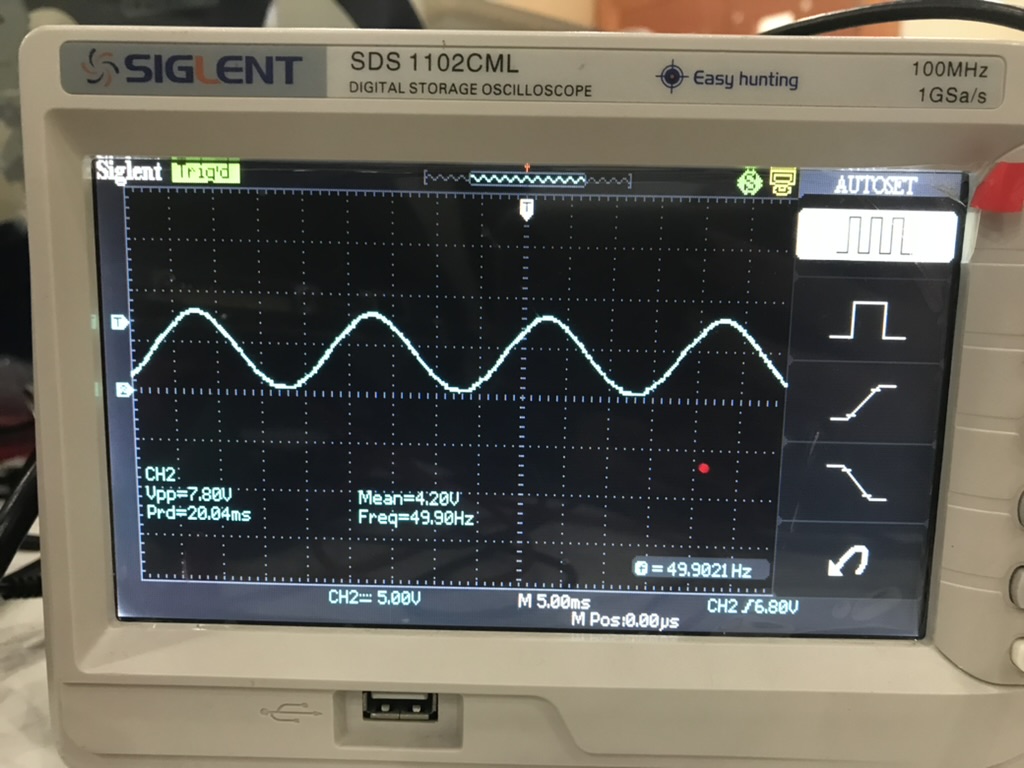
第十六届“挑战杯”重庆大学选拔赛 2019.05
大二第二学期,我与队友们以“基于组网技术的自供电水表抄取系统”参加了“挑战杯”重庆大学选拔赛,并取得了特等奖。
📌项目摘要
本系统的创作目的是制作一套可行性强且节能的物联网自动抄表系统。该系统由水表端、网关端和上位机端三个部分组成,通过两级网络链接,全程无线、可自发电。
水表端实现完全自供电,无需人工更换电池;网关端负责中转处理用水数据,同时为工作人员和用户提供核查窗口;上位机终端的数据库储存用水数据,同时提供 UI 界面,工作人员可实时查看用户用水情况、用水历史记录以及图表。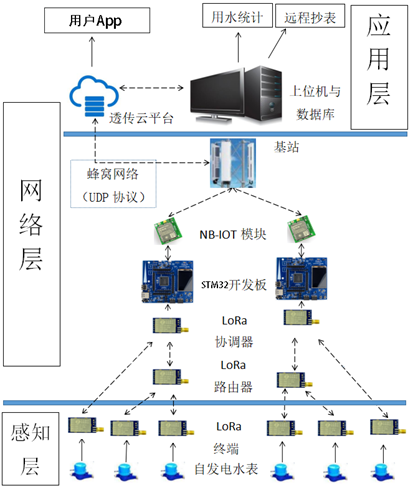
该系统的网络由作为二级网络的 NB-IOT 链接以及链接下作为一级网络的若干局域网构成。在低功耗方案的基础上加上自供电方案,实现表端“外部零功耗”,节能环保。“LoRa +NB-IOT”的模式,建网成本较低,数据实时性强。该系统易于组装,节点设置自由,安装好后基本不需要人员管理;采集到的数据可用作实时扣费或者时段用水分析。
📌个人负责
我在团队中担任水表端和网关端程序设计,主要核心技术在于LORA与NB-iot模块(BC95)构建自组网网络。
📌系统方案
根据物联网的一般架构形式,本系统从架构上面可以分为感知层、网络层和应用层,主要实现过程是通过自供电水表节点段、路由器、协调器、云平台等实时在线通信设备,配套相关通信技术方案,组成一个自供电水表抄取系统。
1️⃣水表端
自供电水表端结构如图所示,由发电部分、霍尔流量计和水表端无线节点组成。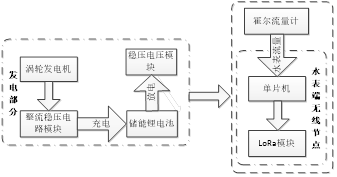
其中,发电部分由涡轮发电机、整流稳压电路模块、储能锂电池和稳压模块组成,用户用水时由涡轮发动机产生三相交流电,通过整流稳压电路模块输出稳定电压给储能锂电池充电,储能锂电池通过升降压稳压模块输出稳定电压霍尔流量计和水表端无线节点供电;霍尔流量计用于水流量测量;水表端无线节点的单片机用于读取霍尔流量计输出的水表流量并经过一定的数字信号处理后传输给LoRa(远距离无线电模块)模块,LoRa模块用于把水表流量数据向网络层发送。
水表端AC-DC电路原理图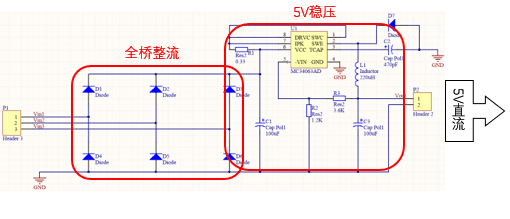
ACDC稳压电路采用三相全桥整流电路以及MC34063为核心的稳压电路组成,该电路具有整流纹波小,转换效率高的特点,符合应用情景需要。
主控芯片采用stm32f103c8t6型单片机,该单机工作电压为3.3V,正常工作时电流最大为25mA,休眠状态下仅有几毫安,耗能小,且拥有成本较低的优点。
用水量采集: 在本系统中,采用4分44mm的霍尔流量计作为流量传感器,其中,流量通过数学模型可计算得到,乘以用水时间即可得到用水量。该系统具有异常用水报警功能,当持续用水超过一定时间,系统会发送非正常用水提醒到云端。
水表端LoRa电路原理图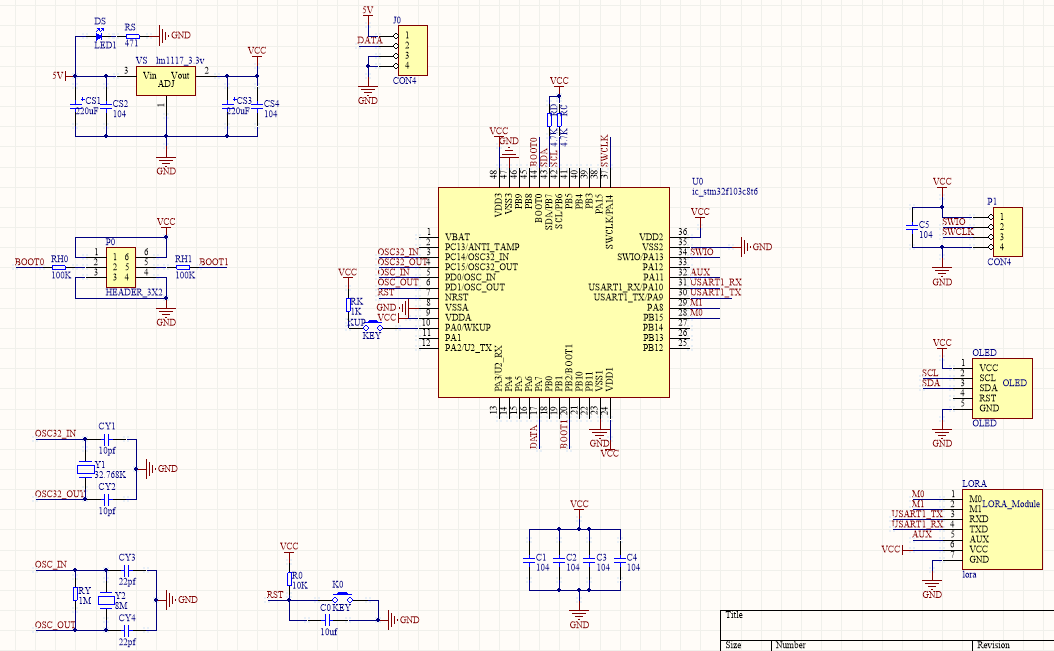
程序逻辑按LoRa水表端程序框图执行,用水数据由Lora端发出传至网关。网关对数据进行处理后,由NB-IOT模块发出经由基站传送到云端。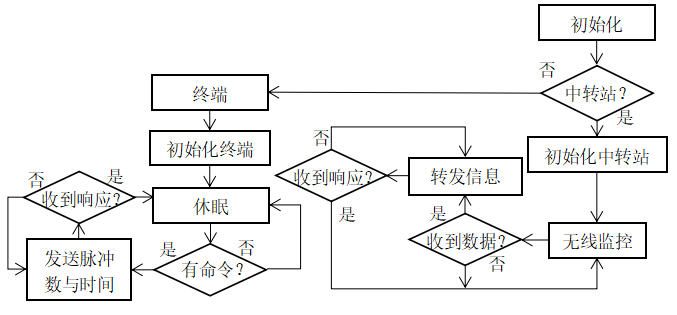
2️⃣网关端
NB-IOT网络架构框图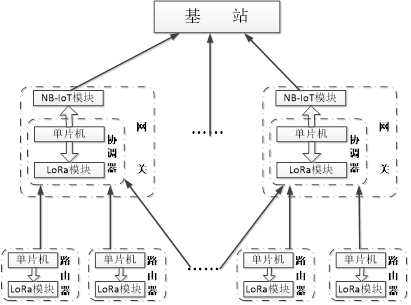
网络层结构示意图如图所示,本系统采用STM32单片机为 LoRa模块和NB-IoT(窄带物联网技术)模块的主控CPU,数据处理以及控制 SX1278 进行通信。由于现有的 LoRaWAN 为星形网络,在某些分户水表在户主楼层的高层楼栋不能覆盖完全,因此需要搭建 LoRa 中转平台。借鉴 ZigBee 组网的思路,利用 LoRa 模块点对点通信模式,自制“LoRa 消息中转模块”作为中转站来搭建树形网络。为保障数据稳定传输和避免通信冲突,建立了节点应答机制,确保数据不会丢包。STM32单片机负责配置 LoRa 模块的地址、信道、工作模式等参数以及数据的接收发送。
通过捕获脉冲数,可获取用户用水量。终端每获取到用户一次用水的用水量,便向上传一次数据。数据通过两级网络上传到云端,整套系统的响应延迟不超过12秒,丢包率几乎为0。
网关端程序框图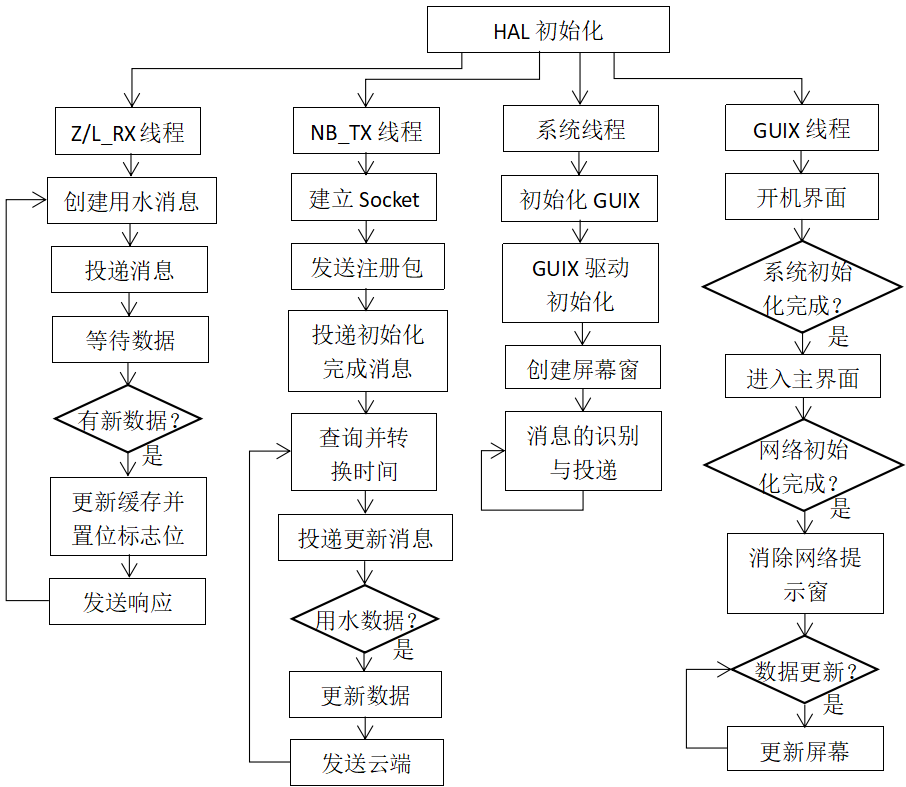
本系统使用三个自行创建的线程:系统线程、接收线程、发送线程。这些线程通过消息框架进行通信。系统线程处理消息和GUIX事件,并维持系统状态数据;串口接收线程接收来自ZigBee协调器串口的数据,计算用水量并投递用水量更新消息;串口发送线程辅助NB-IOT BC95进行物联网通信,发送用水量至透传平台,并接收当前的网络时间,投递NB初始化完成及实时更新时间的消息。
🎁水表端、网关端实物图
🎁外包装设计效果图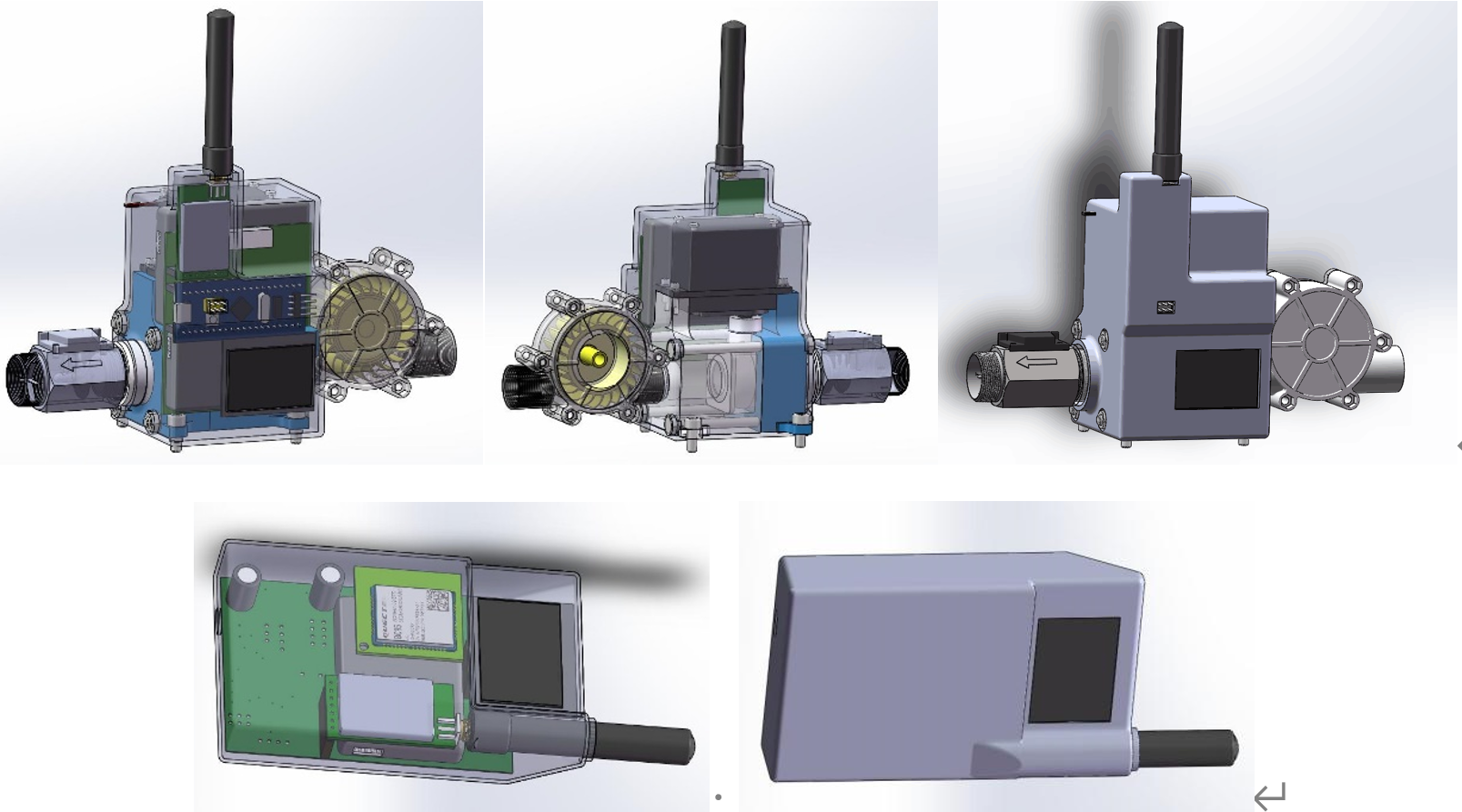
3️⃣上位机端
用户打开上位机时,自动登入NB-IOT网页进行实时监听,获取由网关发来的用户用水量数据。若接收到新的数据,则存入数据库中,并根据数据库的内容更新上位机界面,管理者可通过界面查看各用户用水量,其流程如图所示。
上位机结构框图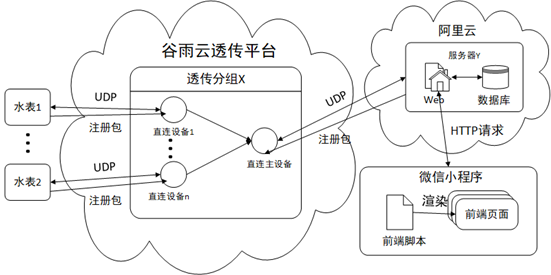
谷雨透传云平台 数据传输采用点到云模式,通过谷雨云平台,水表端与上位机透传用户用水数据。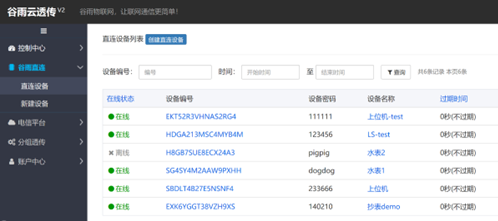
上位机 本上位机软件由后台管理和数据管理两个部分组成。后台管理由网络监听、运行环境、数据库组成;数据管理由参数设置、数据抓取、数据处理、GUI组成。在上位机端,用户的用水量可自动更新并以图表的方式呈现,同时管理者可通过按钮查看指定用户的用水量。同时,用户无需安装Python解释器或任何模块即可运行本软件,保证了上位机的可应用性,其界面如图所示。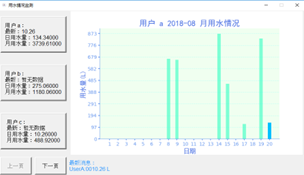
手机APP 用户查看个人用水数据以APP前端开发实现用户用水可实时查看、用户用水可缴费、异常用水可警报等功能。在数据库的基础上,管理者可分析、挖掘用水量背后潜在的经济价值,实现信息的互联互通,实现城市用水的宏观调控,起到人机交互的作用。
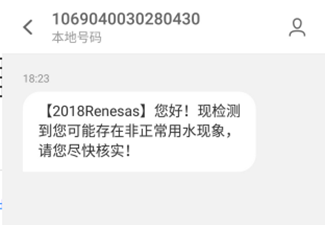
同时,针对用户可能出现的非正常用水现象(如漏水、忘记关水等),会在终端处进行监测,并返回给上位机,上位机通过短信云发送短信提醒,并且在手机app上给出提示预警。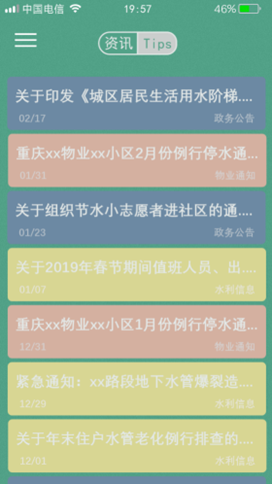
手机小程序 用户查看个人用水数据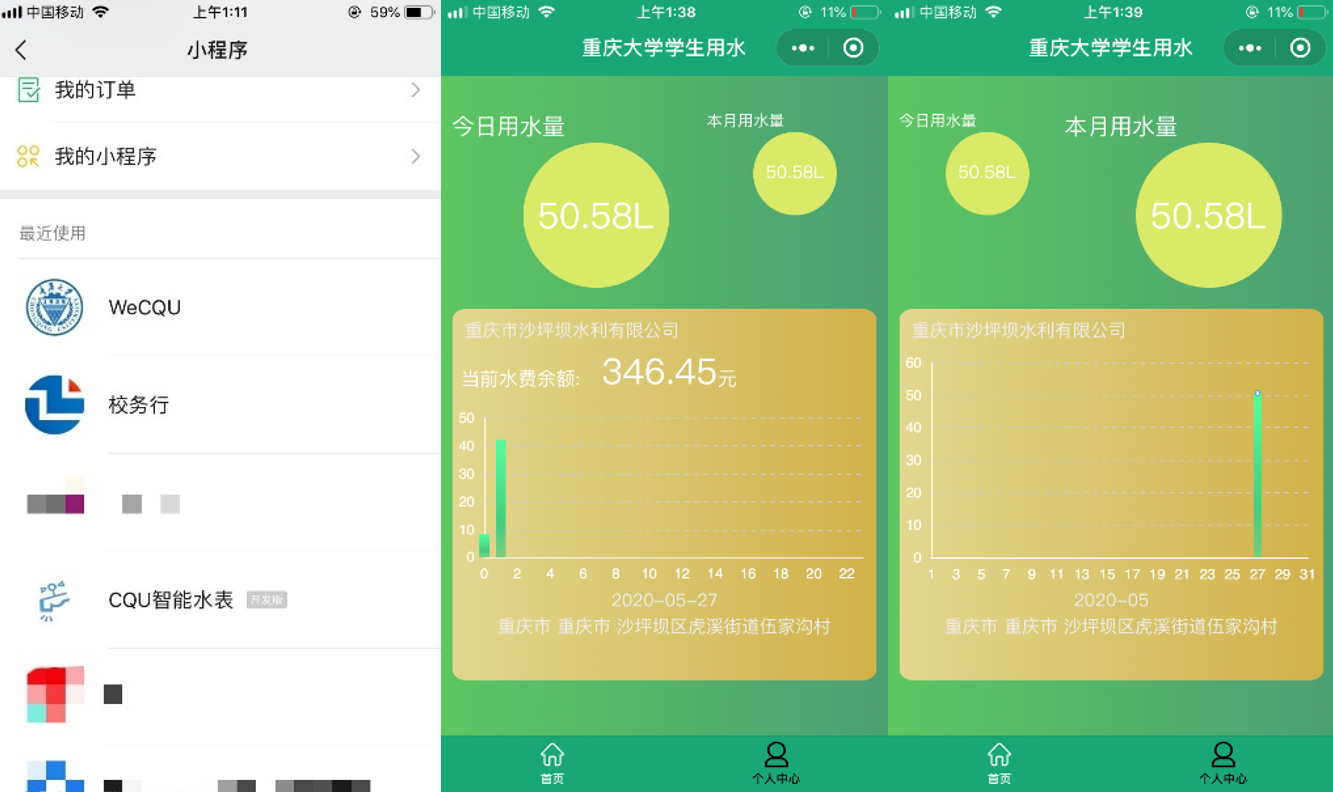
4️⃣测试
针对系统功能,搭建了水表模型,进行了穿墙测试、发电与耗电指标测试、用水量计算准确度测试。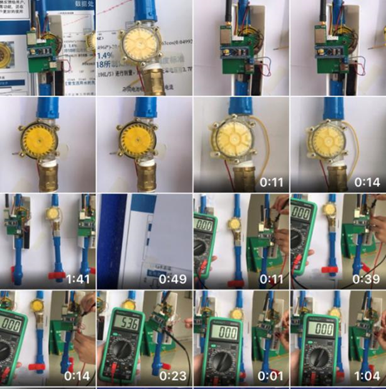
穿墙测试lora最大穿墙楼层为11层,信号传播距离和穿透能力在可接受范围内,可以根据需要在节点间布置路由器(中转站)节点来增强信号或者更换更强力的天线来解决信号连接问题。
发电与耗电测试在正常流速下,充电电流约为113mA,最大充电电流约为115 mA;ZigBee终端正常工作的工作电流实测为 31.0 mA、睡眠模式的工作电流实测为2.2 mA。
通过计算,假设家庭某一天的用水时长为 x 小时,理论发电功率在 100x-115x mAh,由于LoRa单次发射时间平均大概在0.4s(0.25s前导码+0.15s的数据)左右,假设平均每天发射60次,则电流耗电量为 x*7.83+(24-x)*0.08+0.86=7.75x+2.78 mAh,理论上在 0.026-0.030 h(1.8min)的时段内用电可能达到充放电平衡。考虑到24小时的待机耗电量为1.92 mAh,3200mAh的充电电池理论上可供该系统待机1666.7天(4.5年)。
用水量计算测试采用三次样条插值B进行模型拟合,经计算模型最大相对误差为1.4%,流量计所能检测脉冲的最低流量为1.03*10^(-5) m^3/s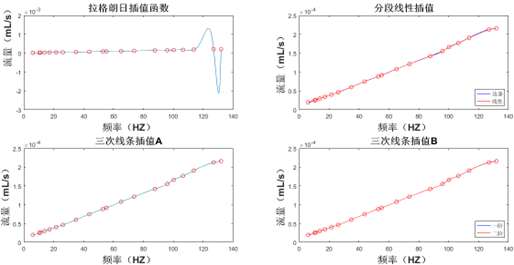
第十届“大学生科研训练计划”(SRTP)项目 2019.06
📌项目摘要
本项目以减少车辆平均等待时间为目标,在兼顾行人行车安全的前提下,根据车流量情况进行红绿灯系统智能化配时,可以有效的提高道路的利用率,减少车辆等待时间,可有效提高道路的利用率。系统先通过路口监控,针对实时路况,精确计算与评估该区域内的车流量,再通过数据分析,优化红绿灯的合理使用,在交通饱和状态下优化区域内最大的通行量,从而实现对交通信号灯的智能控制,改善交通环境,将人工操作成功升级为智能信号灯控制。
📌个人负责
在团队中负责软件部分,使用 89C51 单片机协调各车道不同车辆数目情况下红绿灯实时亮灭状况。
📌系统方案
红外传感器模块
红外模块:当有汽车进入、离开道路上的车流量感应区时,红外传感器能感应车辆的进入和离开,并传输脉冲信号给单片机。
信号灯控制
单片机根据脉冲数计算南北,东西两条道路车流量,并将南北,东西两条道路车流量输入数组,从而得到下一周期交通信号灯的配时。
模糊算法
模糊算法:MATLAB模糊控制器实现模糊控制,当输入车流量,模糊控制器可生成相应道路时间;并根据实验室条件,采集多组车流量数据,得到多组交通信号灯配时,并将车流量,交通信号灯配时写进程序。
MATLAB模糊控制器工具箱
设定南北通行10秒,通过红外传感检测器得到南北,东西的车流量。再设定此时红灯及绿灯方向的隶属度,以及输出T的隶属度这里我们可以选取标准的二维控制结构,即输绿灯车辆书和红灯车辆数,输出为控制量T。注意这里的变量还都是精确量。相应的模糊量为input1,input2和output,我们可以选择增加输入(Add Variable)来实现双入单出控制结构。
第八届“国家级大学生创业训练”(国创)项目 2020.07
📌项目摘要
项目成员来自光电、软件、经管、公管、能动、法律等学院。最终八名成员有六名获得了保研资格。
为期一年的项目过程中,我们创立了公司、成立了淘宝店铺、与重庆谋机械加工厂签订了成产合作意向书、作品受到了重庆大学节能办认可。
📌项目总结
最终取得结题成绩为“优秀”,作为项目负责人,在创业实践的过程中了解到了科创产品孵化的不易,提升了自己团队领导与协调能力。
第八届“全国大学生光电设计大赛” 2020.08

📌项目摘要
本套基于组网技术的传染病密切接触者追踪系统应用于游乐园、商场、超市等公众场合,测量进出人员的体温并扫描个人的健康码获取个人信息,同时利用组网技术将测温温度、测温时间、测温地点以及扫码获取的居民个人信息上传到云端。同时,上位机部署在云端服务器上,收到谷雨云平台转发的数据后对数据进行处理并存进服务器数据库;小程序通过调取服务器数据并将其渲染成图表。
若某时某地出现了确诊案例,管理人员就可以根据数据库知晓该确诊者出入公众场合的情况、排查密切接触者并进行个人信息调取;个人用户可以通过小程序实时查看自己的健康数据及安全等级。
📌个人负责
我在团队中担任扫码测温端和网关端程序设计,主要核心技术在于LORA与NB-iot模块(BC95)构建自组网网络。
重庆大学第五届“互联网+”大学生创新创业大赛 2019.08
2019年全国大学生电子设计竞赛“TI杯” 2019.10